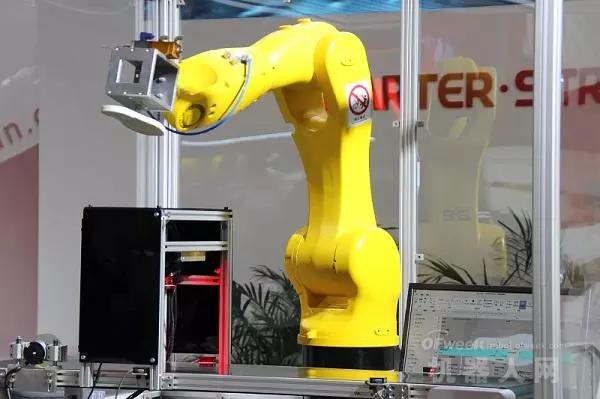
配天机器人如何解决需求问题?
近年来,工业机器人已逐渐成为现代生产工艺的重要组成部分及未来发展趋势。伴随信息产业的进步,尤其是人工智能和机器学习领域的突破,工业机器人朝着智能化的方向发展。
现阶段,我国主要的工业机器人有焊接、搬运、喷漆、切割、包装、码垛机器人。主要的应用领域为汽车行业、电子电气行业等,在中国制造业向“智”造业转型的背景下,工业机器资本市场发展看好!
工业机器人核心技术有待提高
控制器、伺服电机、减速器时工业机器人的核心部件,但是由于我国工业机器人发展起步较晚,技术相对较落后,目前我国的工业机器人核心技术零件仍然大量依赖进口,我国企业业普遍存在自主创新研发意识不足、研发投入不够等问题,削弱了国内企业在面的国外竞争对手的核心竞争力。
同时,我国机器人产业链的中游本体制造和下游集成开发的厂商竞争激烈,工业机器人应用场景广泛,例如冲压、焊接、涂装、机械和简单装配等,下游市场需求分散,国内暂时没有建立有效的细分标准,行业将处于完全竞争的状态。
综合看来,当前工业机器人在软件、算法、硬件、机械四方面仍然面临着较大的问题,如工业机器人操作算法过程中数据连接失败、系统文件丢失等;硬件问题中系统死机、轴运行异响或运行抖动,软件问题中的电机过热过载等。都是我国工业机器人目前在运行过程中存在的问题.
针对这些问题,配天机器人带领团队,致力于从数控系统、伺服系统以及新能源汽车控制部件的设计开发,从机器人速度、精度、抖动问题出发,带来问题与需求驱动研发与创新的实例。
配天机器人在运行过程中,采用速度前瞻,大大减少加减速的频繁变化,相对于不采用速度前瞻,加工时间明显变短,效率提高30%以上。
如何解决速度不够快
配天机器人采用O型速度规划,根据机器人轴空间的运动学、动力学约束及笛卡空间运动学约束,计算出出主导轴速度,加速度,加加速度上限,保证运动平稳(加速度连续)的前提下,发挥出机器人的最大性能。并且使用重力补偿、DH补偿、多点标定、误差补偿算法,解决精度不够高问题。
机器人在运行过程中会发生抖动问题,引起抖动的主要原因
一:激励的频率落在系统传递函数极点附近
例如双惯量系统(关节传动的一种常见建模)中,弹性系数和负载决定了系统极点,如果极点附近存在周期性激励,则易引发共振。
二:驱动控制环路难以通过一套参数适配所有工况
如为正常负载调试的参数,在驱动大惯量负载时,为了提供较大的力矩输出,闭环控制中需要较大的误差量。因此在电机出力发生快速变化时,难以快速达到稳定。
由于企业出于对成本考虑,减速器末端一般不会加装编码器,位置反馈只能反映电机输出端的实时位置,因此对抖动的观测比较困难。而且,通用机器人系统现场工况的多样性与时变性,也导致了抖动问题难以抑制。
抑制抖动的方法
1.观测器法,通过预估本体末端位置来实现
2.阻尼法,提取振动速度信息,并施加一个与其反向的阻尼
3.滤波器法,通过增益补偿消除陷波引起的相位误差,对共振频点进行陷波滤波
4.驱动器参数整定与动态适配,根据负载情况适配恰当的驱动器参数,以实现对振动的有效控制,负载惯量的识别可以由控制器完成、亦可由驱动完成
5.力矩前馈,基于动力学的力矩前馈,适配大动态范围的负载变化
6.运动学优化,对不同的运动段合理规划加速度/加加速度以减少抖动发生,通过路径优化或速度规划尽量减少共振发生的可能性/影响程度
7.减弱激励强度,一个典型的周期性激励:减速器传达精度的变化,由于加工与安装的不完美,减速器在传动过程中会附加周期性的干扰,形成共振激励源,通过优化核心零部件的品质,有助于控制激励幅度,进而抑制振动

新一版配天专用3D离线仿真软件系统,支持多种格式模型,PC端运行,可快速离线编程,采用语法校验,示教器操作真实还原。机器人完全可以折弯下料跟随,折弯机在折弯钣金过程中,机器人通过判断折弯机滑块压紧位移所对应的光栅尺或者编码器数据,实时调整跟随角度与位移,达到与被折弯钣金翘起的同步。压铸下料软浮动时,可实现可以实现一个方向或者同时几个方向的外力牵引浮动功能。
配天机器人将核心放在持续打磨产品上,提升品质以及可靠性,且力求在控制系统、软件功能包上,进一步拓展出更全面的产品解决方案,纵向深化产品垂直度,横向拓宽适用范围,向着国际一流企业进发。从而为传统企业的工业自动化转型,提供更全方位更细节化的市场支持。致力于成为世界领先的工业母机及智能化精密工业关键部件提供商,并进而成为端到端网络工业技术和解决方案提供商。

相关阅读:
声明: 本网站为冲压和钣金业内信息集合和展示平台,欢迎不同的声音和观点,为行业人士提供参考,文章并不代表MFC的观点。书面刊用本站及MFC《金属板材成形》的原创文章,必须获得MFC的书面授权;电子平台转载,则必须注明作者和出处,对于盗版、冒名和不注明出处等行为以及由此产生的负面后果,MFC保留追究的权利。
图片新闻






品牌展厅365天全天候线上展厅

推荐专题
- 一周热点
- 月点击榜
- 1MFC钣金篇—钣金加工中折弯扣除系数怎么算(50)
- 2钣金折弯圆弧展开精准计算!(51)
- 3扬力集团:中国锻压机床行业的头部企业 (53)
- 4TPS改善能造成经营财务优势(53)
- 5中国激光切割机市场:3000W以下正在萎缩,高功率渐成主流(54)
- 6MFC《金属板材成形》杂志社十三家折弯机/多边折弯中心厂家/机器人折弯/自动化折弯/折弯自动化制造商推荐(55)
- 7【MFC原创】AIDA 会田:精度高于模具的UL系列精密成形冲床(57)
- 8MFC《金属板材成形》杂志-中国值得推荐的折弯机厂家品牌分析(69)
- 9上汽大众MEB工厂车身焊装亮点介绍(110)
- 10【MFC推荐】天生无畏 卓而不凡 I D-Tube 520重载型专业激光切管机(144)


